Steuerung eines Beschriftungs-Lasers:
(Entwickelt ca. 1998)
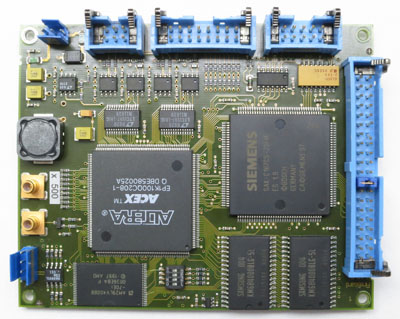
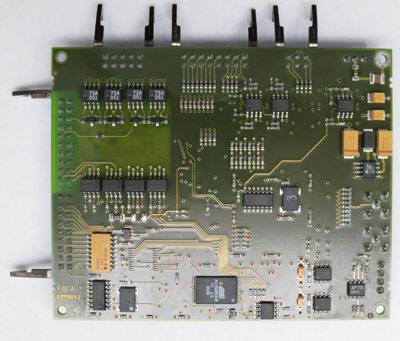
In der Abbildung zu sehen:
Oberseite (Bauteil-Seite) links
Unterseite (Lötseite) rechts
Übersicht über die Hardware:
1 x Ausgänge zur Spiegel-Ansteuerung für X und Y (jeweils differenziell)
1 x Q-Switch Ausgang digital (Strom) 5mA
1 x Q-Switch Ausgang analog 1V an 50Ω
2 x 5V Ausgang z.B. für Pilotlaser (Strombegrenzt)
10 x 0..10V Eingänge für allgemeine Zwecke
4 x 0..10V Ausgänge für allgemeine Zwecke (z.B. Leistungs-Steuerung)
8 x Digitale Ausgänge über Optokoppler
8 x Digitale Eingänge über Optokoppler
1 x RS422 Schnittstelle
Maße der Leiterplatte: 100mm x 80mm
Verwendeter Prozessor:
SAB-C167CS
Verwendetes FPGA:
Altera ACEX 1k Serie
Übersicht über das System:
Die Steuerung setzt einen einfachen Befehlssatz in Bewegungen der Spiegel und die Ansteuerung des Q-Switch
um. Dabei wird in Echtzeit eine Vorverzerrung berechnet, die die Kissen-Tonnen Verzerrung der Optik
kompensiert.
Eine "First Pulse" Kompensation wird durch die Programmierbare Höhe, Dauer und Anstiegsgeschwindigkeit der
Q-Switch Impulse erreicht, wobei unterschiedliche Parameter für den ersten Impuls und die Folgeimpulse
verwendet werden.
Eine Besonderheit ist der Bitmap-Vektor. Hierbei wird, abhängig vom Inhalt der Bitmap-Daten, ein
unterschiedlicher Q-Switch Impuls erzeugt, so daß, abhängig vom Material, eine stärkere oder schwächere
Markierung erreicht wird, die zum Zeilenweisen aufbau von Bildern benutzt werden kann.
Die Berechnung der X/Y Punkte und die Ausgabe an die DA-Wandler erfolgt mit 1 Megasample/s
Die wichtigsten Bewegungs-Befehle:
moveabs
Parameter:
(int)X, (int)Y, (unsigned)Delay
Beschreibung:
Bewegt die Spiegel mit der Geschwindigkeit MoveSpeed und ausgeschaltetem Laser von der momentanen
Position zum Punkt X,Y. Die Wartezeit nach dem Vector beträgt Delay (us).
drawabs
Parameter:
(int)X, (int)Y, (unsigned)Delay
Beschreibung:
Bewegt die Spiegel mit der Geschwindigkeit DrawSpeed und eingeschaltetem Laser von der momentanen
Position zum Punkt X,Y. Die Wartezeit nach dem Vector beträgt Delay (us).
drawbitabs
Parameter:
(int)X, (int)Y, (unsigned)Delay, (unsigned)ByteAnzahl
(unsigned char)Byte(1), (unsigned char)Byte(2), ....
(unsigned char)Byte(n)
Beschreibung:
Bewegt die Spiegel mit der Geschwindigkeit DrawSpeed von der momentanen Position zum Punkt X,Y. Dabei
werden die Bits in Byte(1) bis Byte(n) gleichmäßig auf die Strecke verteilt. Byte(1)-lsb .... Byte(n)-msb. Die
Wartezeit nach dem Vector beträgt Delay (us).
jumpabs
Parameter:
(int)X, (int)Y, (unsigned)Delay
Beschreibung:
Die Register für die Momentan-Position werden direkt mit den neuen Werten für X, Y geladen. Die Wartezeit
nach dem Sprung beträgt Delay (us).
drawpoint
Parameter:
(unsigned long)Anzahl
Beschreibung:
Gibt an der momentanen Position Anzahl „Schüsse“ mit der Frequenz LaserFrequenz aus.